In the heart of China’s Shaanxi province, researchers are revolutionizing the way we think about apple harvesting. Bin Yan, a professor at the College of Automation and Information Engineering at Xi’an University of Technology, is leading a team that has developed a smart orchard robot capable of bimanual coordination and advanced communication, potentially transforming the agricultural sector.
The team’s research, published in the journal *Agronomy* (translated to English as “Field Cultivation and Soil Science”), addresses a critical need in modern agriculture: increasing the efficiency of high-value crop harvesting. Their solution? A six-degree-of-freedom bimanual apple-harvesting robot that can navigate complex orchard environments with ease.
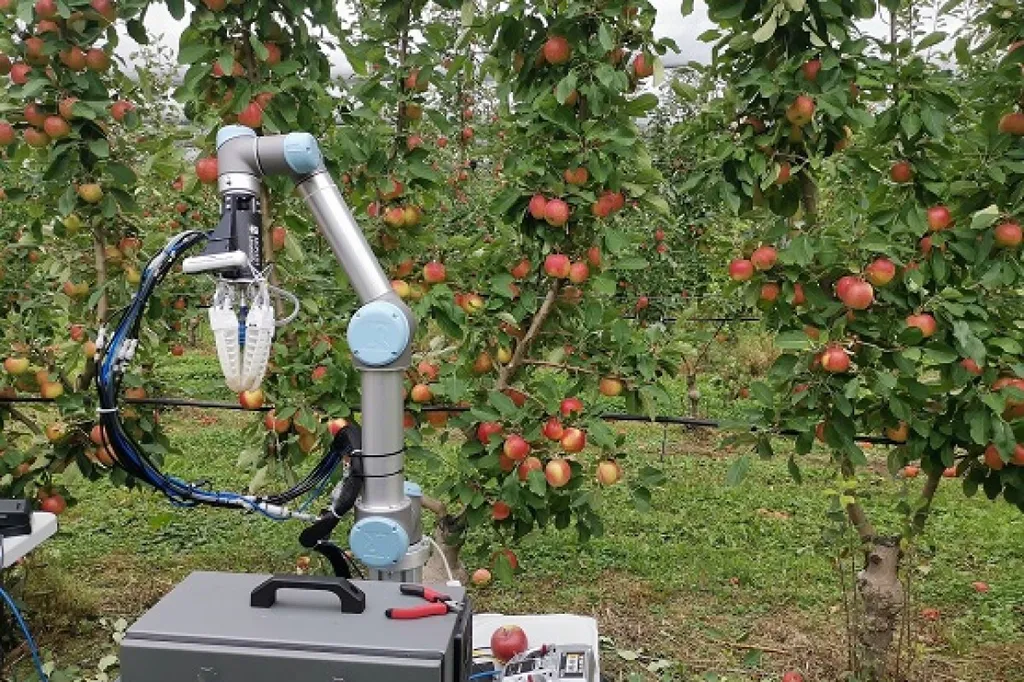
Yan and his team evaluated three spatial layout configurations for the dual-arm system, ultimately settling on a “workspace-overlapping Type B” arrangement. This design allows the robot to avoid obstacles and work efficiently in contemporary orchard settings. The robot’s arms can operate independently or in sync, thanks to a networked communication framework implemented via Ethernet switching technology.
One of the most innovative aspects of this research is the development of control architectures for two types of end-effectors: a compliant gripper and a vacuum-based suction mechanism. “This dual approach allows the robot to handle a wide range of apple sizes and shapes,” Yan explains. The team also formulated an intersystem communication protocol to integrate the robotic vision system with the dual-arm control architecture, creating a modular parallel execution model between visual perception and motion control modules.
The robot’s performance was put to the test in Red Fuji apple orchards, with impressive results. The suction-based arm achieved an 85.6% success rate, while the gripper-based arm reached an 80% success rate. Single-fruit retrieval averaged 7.5 seconds per arm, yielding an overall system efficiency of 3.75 seconds per fruit.
So, what does this mean for the future of agriculture? Yan believes that this research lays the groundwork for intelligent apple-harvesting systems. “Our findings offer methodologies for the evolution of precision agronomic automation,” he says. This could lead to increased efficiency, reduced labor costs, and improved fruit quality, ultimately benefiting both farmers and consumers.
The commercial impacts of this research are significant. As the demand for high-value crops continues to grow, so does the need for innovative harvesting solutions. This smart orchard robot could be a game-changer, not just for apple growers, but for the entire agricultural sector.
Moreover, the principles behind this technology could be applied to other areas of agriculture, from vineyards to berry farms. As Yan and his team continue to refine their design, they are paving the way for a new era of agricultural robotics. Their work is a testament to the power of innovation and the potential of technology to transform traditional industries.
In the coming years, we may see these smart orchard robots becoming a common sight in apple orchards around the world. As they do, they will not only change the way we harvest our crops but also the way we think about the future of farming.