In the ever-evolving landscape of smart agriculture, researchers are constantly seeking innovative solutions to enhance efficiency and productivity. A recent study published in *Smart Agricultural Technology* introduces a novel approach to multi-UAV path planning for plant protection, addressing longstanding challenges in the agriculture sector. The research, led by Baofeng Ji from the School of Information Engineering at Henan University of Science and Technology and the Longmen Laboratory’s Intelligent System Science and Technology Innovation Center, presents a hybrid algorithm that promises to revolutionize how unmanned aerial vehicles (UAVs) are deployed in farming operations.
The study tackles a critical issue in smart agriculture: the optimization of UAV paths for plant protection across multiple dispersed farmlands. Traditional methods often fall short, delivering suboptimal solutions, poor stability, and inefficient scheduling. These limitations not only hinder operational efficiency but also impact resource utilization, ultimately affecting the bottom line for farmers and agricultural businesses.
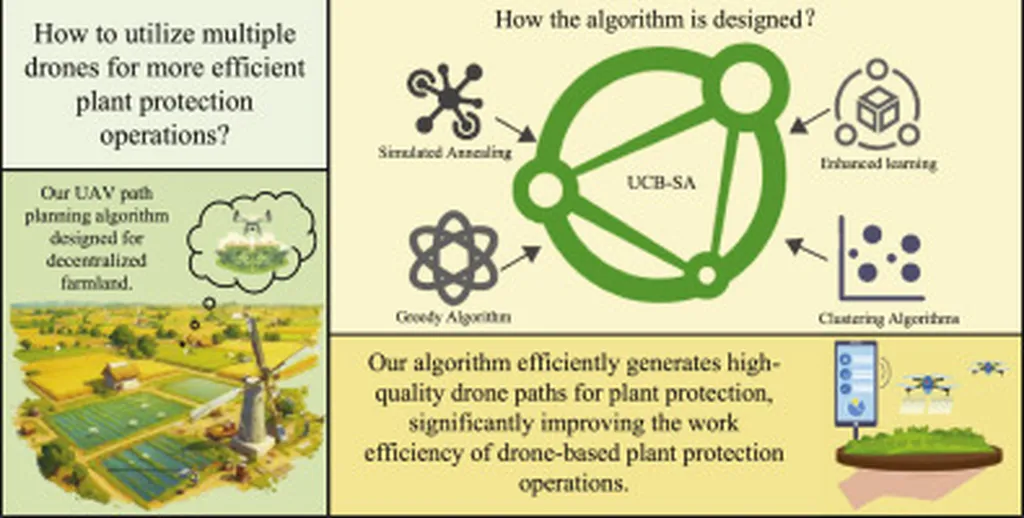
To overcome these challenges, Ji and his team developed a mixed-integer linear programming (MILP) model for collaborative path planning of multiple UAVs. The model integrates the upper confidence bound (UCB) strategy with simulated annealing (SA), creating a hybrid optimization algorithm designed to improve initial solutions through a clustering-based approach combined with a greedy heuristic. This innovative method enhances search efficiency and accelerates convergence, leading to more stable and effective path planning.
“The hybrid UCB-SA algorithm significantly outperforms traditional methods,” said Ji. “Our simulations show average cost reductions of 8%, 13%, and 23% compared to standard SA, large neighborhood search (LNS), and genetic algorithm (GA), respectively. This translates to substantial savings in time, fuel, and operational costs for farmers.”
The commercial implications of this research are profound. Efficient path planning for UAVs can lead to more precise and timely application of pesticides and fertilizers, reducing waste and environmental impact while increasing crop yields. For agricultural businesses, this means improved resource management and higher profitability. The technology also has the potential to scale across different types of farmlands and crop types, making it a versatile tool for the agriculture industry.
Looking ahead, the success of this hybrid algorithm could pave the way for further advancements in agricultural technology. As UAVs become more integrated into farming practices, the need for sophisticated path planning and optimization algorithms will only grow. This research sets a strong foundation for future developments, encouraging other researchers to explore similar hybrid approaches and innovative solutions to enhance agricultural efficiency.
In an industry where every percentage point of efficiency can translate to significant financial gains, the work of Baofeng Ji and his team represents a significant step forward. Their research not only addresses current challenges but also opens up new possibilities for the future of smart agriculture. As the sector continues to evolve, the integration of advanced technologies like UAVs and optimization algorithms will be crucial in meeting the demands of a growing global population and ensuring sustainable agricultural practices.